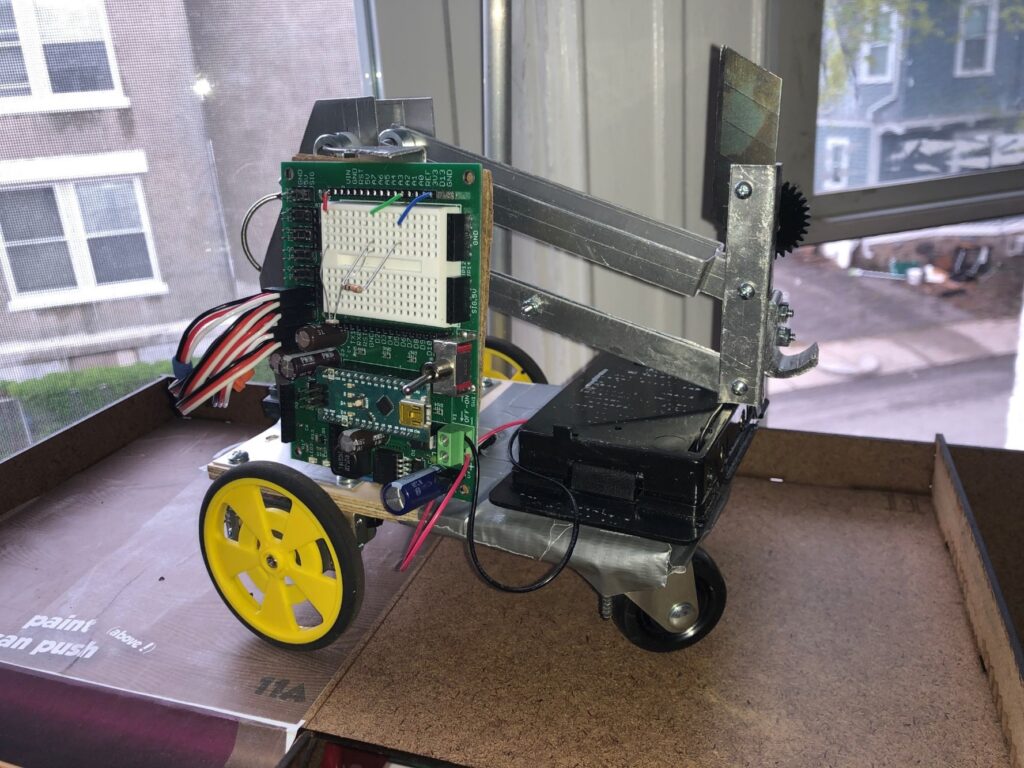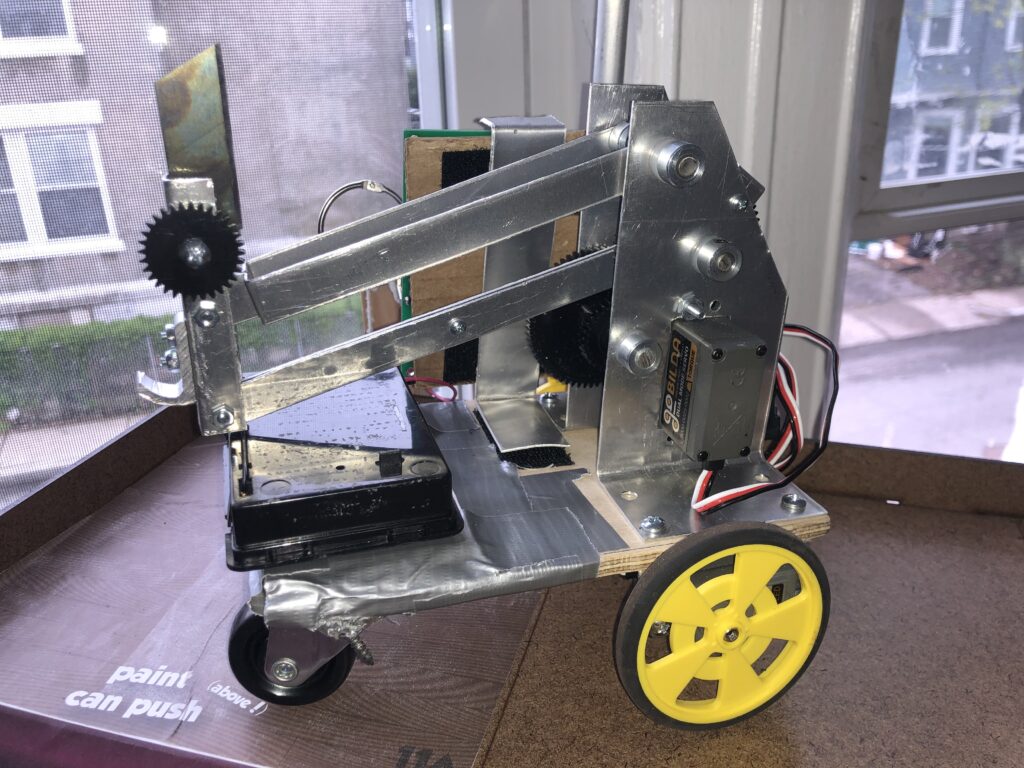
In Design and Manufacturing I, I was tasked with developing and constructing a robot to compete in the Home Alone Together Challenge. Given sheet metal, wood, motors, electronics, and various tools to fabricate, I began to model a 4-bar mechanism to displace a spring, cut a zip line, ride a zip line, and extend to knock over various game pieces.
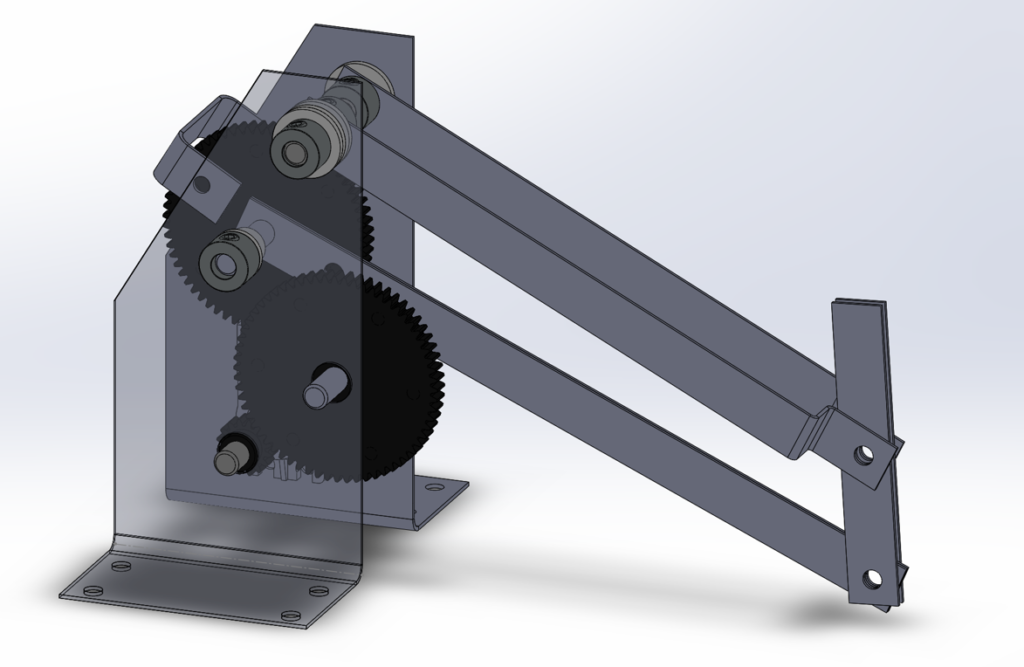
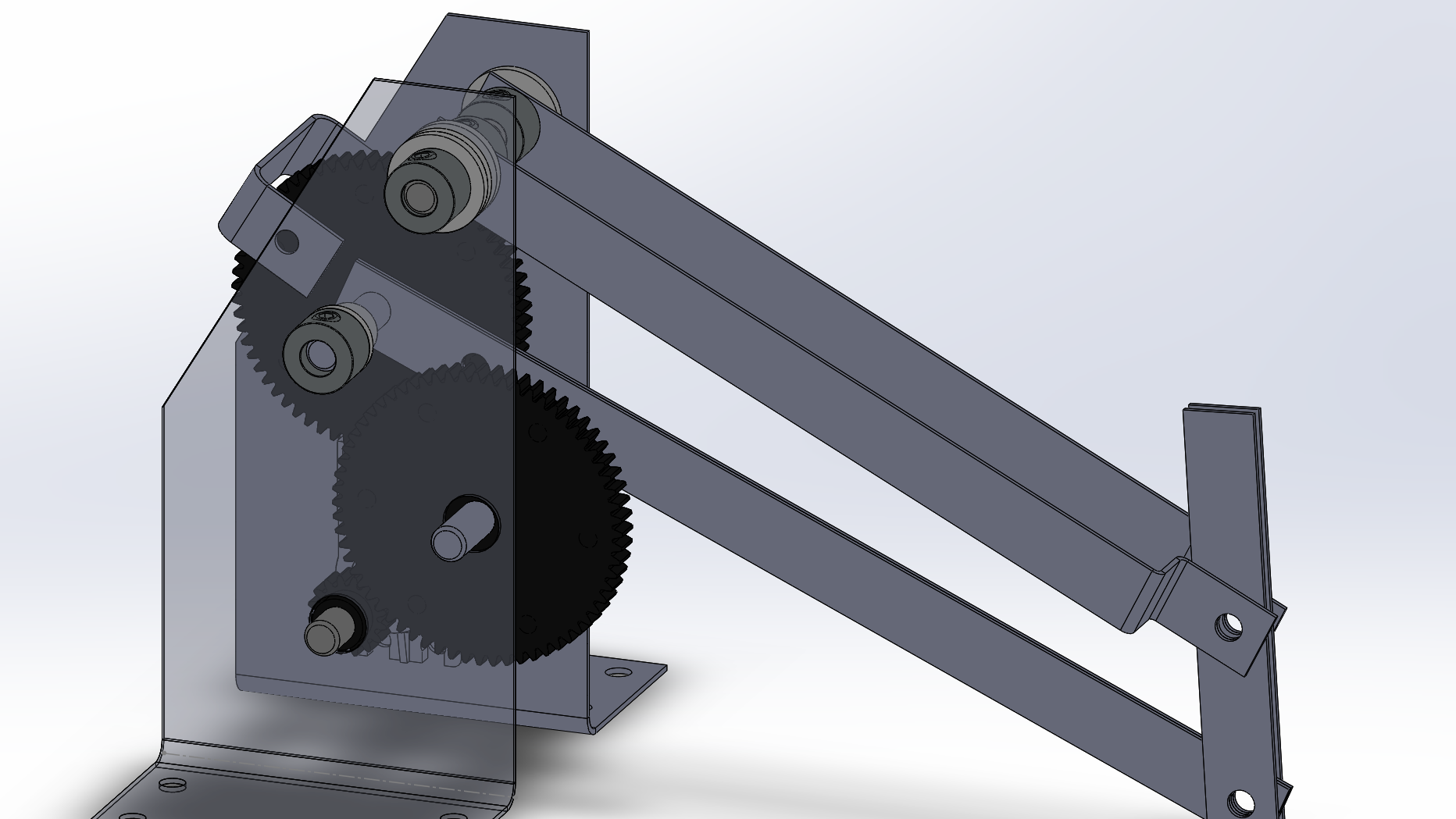
The biggest challenges proved to be providing enough torque with the arm mechanism to be able to fully displace the spring the desired distance of 6 inches and have enough height to reach zip lines and higher portions of the game board. To allow for greater range of motion, I developed a 4-bar mechanism that would allow the driven arm to pass through the planes of the guided arms, thus substituting the classic parallel arm style for an offset one. Additionally, the arm length and resultant moment it would lead to while lifting the spring would be catered to with an 8:1 gear box housed within the main module of the robot.
The arm mechanism extends to reach and knock over two delrin “paint cans”
The arm extends to cut a rope zip line
The arm and hook pull the spring, providing 6.76 N*m of torque